YOLO系列算法原理讲解----(3)Yolov3算法
本文共 795 字,大约阅读时间需要 2 分钟。
YOLOV3介绍
- 速度和精度均衡的目标检测网络
- 融合多种先进方法,改进YOLOV1/V2缺点,且效果更优
- 小物体检测
YOLOV3改进策略:
- 更好的主干网络(类ResNet)
- 多尺度预测(类FPN)
- 更好的分类器 具体如下: YOLOV3改进策略: - 更好的主干网络
- 精度更好
- 对比如下:
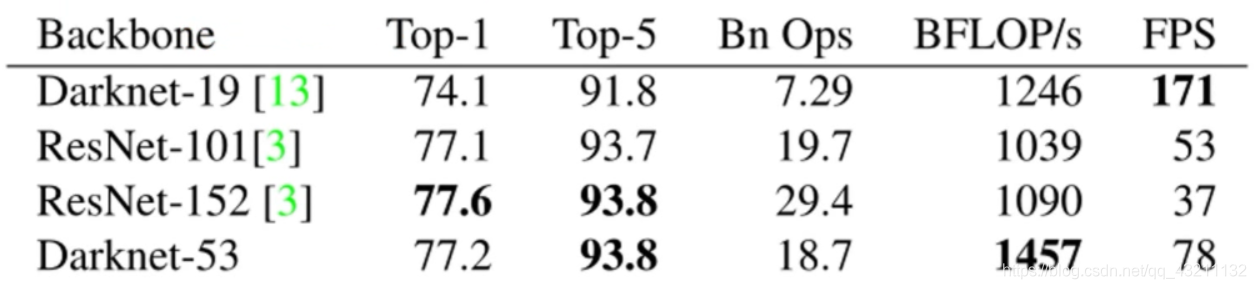 可以看得到采用ResNet可以获得更好的检测效果。 - 多尺度预测(类FPN)
可以看得到采用ResNet可以获得更好的检测效果。 - 多尺度预测(类FPN) - 聚类来得到Bbox的先验,选择9个簇以及3个尺度
- 将这9个簇均匀的分布在这3个尺度上
 右下角采用不同尺度来获取特征作为yolo检测的输入,而对于Anchor的设计,同样采用聚类的方法来获得最终的长宽比,这里通过聚类得到9个聚类中心,将这9个聚类中心平均的分配到3个尺度上,每个尺度预测3个box,对于每种尺度,作者引入卷积层进一步提取特征,在输出box信息。对于尺度1而言。作者通过卷积之后直接得到后续box信息,对于尺度2而言,作者在进行box输出之前,对尺度1输出的卷积进行上采样,然后同卷积2的feature map进行相加,相加之后在通过多个卷积后输出后续的box信息。整个feature map的大小相对于Scale1扩大了两倍。而尺度3相对于尺度2而言同也扩大了两倍。它的原理同尺度2一样。
右下角采用不同尺度来获取特征作为yolo检测的输入,而对于Anchor的设计,同样采用聚类的方法来获得最终的长宽比,这里通过聚类得到9个聚类中心,将这9个聚类中心平均的分配到3个尺度上,每个尺度预测3个box,对于每种尺度,作者引入卷积层进一步提取特征,在输出box信息。对于尺度1而言。作者通过卷积之后直接得到后续box信息,对于尺度2而言,作者在进行box输出之前,对尺度1输出的卷积进行上采样,然后同卷积2的feature map进行相加,相加之后在通过多个卷积后输出后续的box信息。整个feature map的大小相对于Scale1扩大了两倍。而尺度3相对于尺度2而言同也扩大了两倍。它的原理同尺度2一样。
- 更好的分类器:binary cross-entropy loss
- Softmax不适用于多标签分类
- Softmax可被独立的多个logistic分类器代替,且准确率不会下降 binary cross-entropy loss二值交叉熵loss


 Draknet框架
Draknet框架 - 由C语言和CUDN实现
- GPU显存利用效率较高
- 第三方库的依赖较少
- 容易移植到其他平台,如Windows或嵌入式设备 优点:
- 快速、pipline简单
- 背景误检率低
- 通用性强
相比于RCNN系列物体检测方法的缺点:
- 识别物体位置精准性差
- 召回率低
转载地址:http://rbywi.baihongyu.com/
你可能感兴趣的文章
3.10 - Maya Commands: ls
查看>>
3.11 - Dictionaries in Python
查看>>
3.12 - Tuples in Python
查看>>
4.4 - For Loops
查看>>
4.2.2 - Logical and/or Operators
查看>>
Lesson 4 Part 2 Softmax Regression
查看>>
文章中运用到的数学公式
查看>>
Projective Dynamics: Fusing Constraint Projections for Fast Simulation
查看>>
从2D恢复出3D的数据
查看>>
glm 中 数据类型 与 原始数据(c++ 数组)之间的转换
查看>>
Derivatives of scalars, vector functions and matrices
查看>>
the jacobian matrix and the gradient matrix
查看>>
VS2010 将背景设为保护色
查看>>
ubutun里面用命令行安装软件
查看>>
ubuntu 常用命令
查看>>
SQLite Tutorial 4 : How to export SQLite file into CSV or Excel file
查看>>
how to move pivot to origin
查看>>
Optimizate objective function in matrix
查看>>
Convert polygon faces to triangles or quadrangles
查看>>
How do I divide matrix elements by column sums in MATLAB?
查看>>